01Requirements
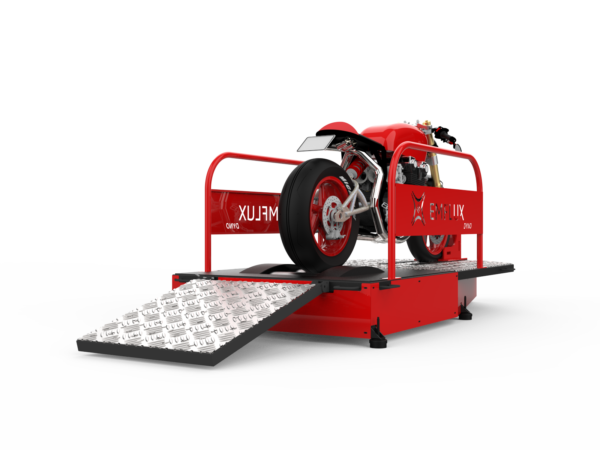
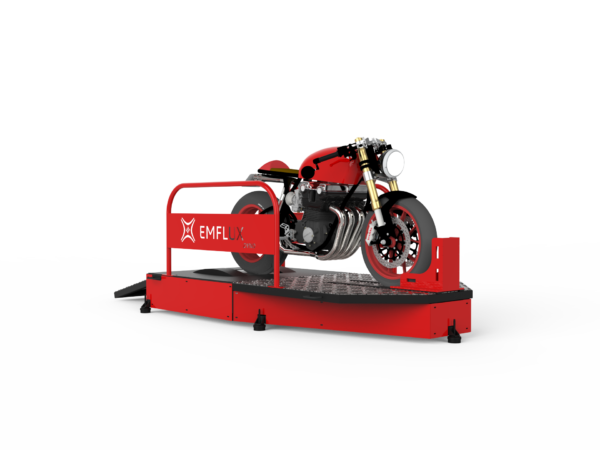
- Test bench for two-wheelers, accommodating wheelbases from 900 mm to 1700 mm
- Real-time data capture with sufficient roller moment of inertia for meaningful runs
- Stiff frame — no resonance corrupting sensor data at test speeds
- Operator safety: tie-downs, guarding, lifting points for transport
- Upgrade path: motor mounting provision to convert to a driven chassis dyno later
- Price point accessible to educational institutions — cost was a design input, not an afterthought
02Key Decisions
How to hit the cost target on fabrication?
Weldment frame with tab-and-slot construction. Designed in SolidWorks Weldments so the whole frame ships as laser-cut tube and sheet; tabs and slots self-locate parts for welding, cutting fixture cost and welder skill requirements. The supplier was consulted during design, not after it.
PC-based DAQ or embedded?
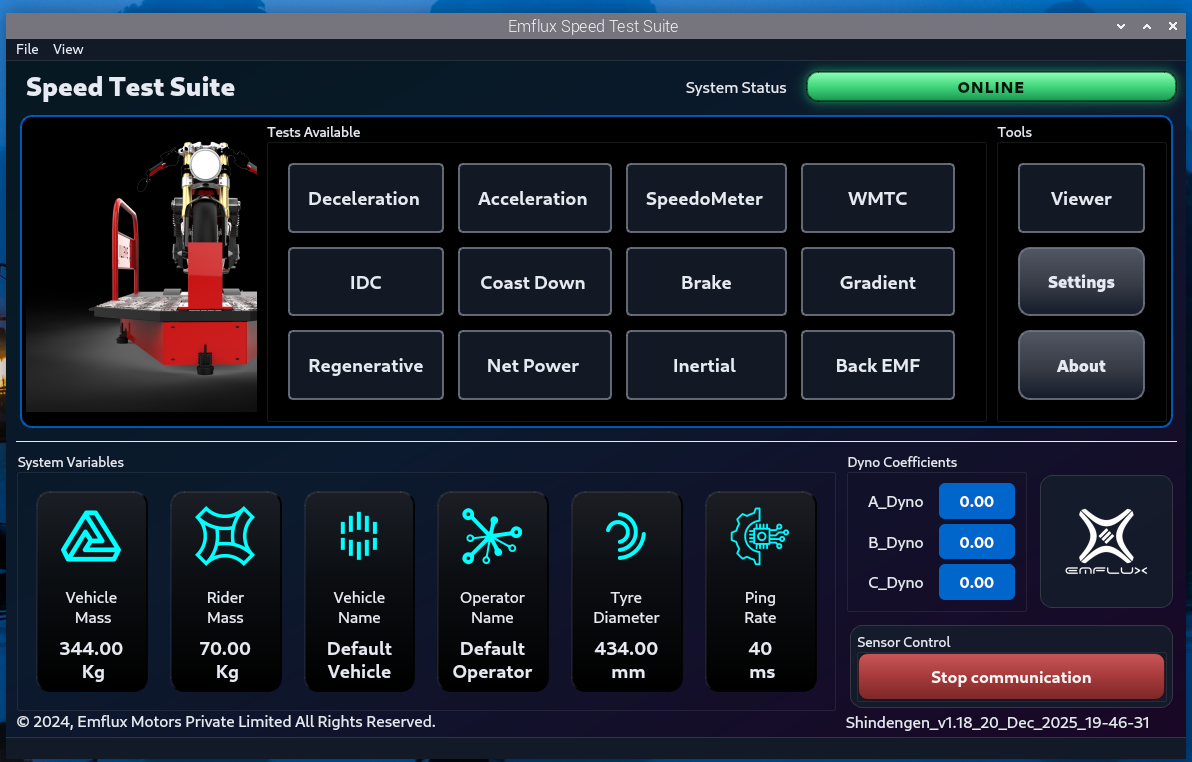
Qt C++ GUI on Raspberry Pi. A full industrial DAQ PC would have blown the budget. The Pi handles sensor acquisition, real-time plotting and test sequencing; Qt gives a responsive native interface. Required learning Qt from scratch — planned for in the project timeline.
How to handle shipping economics?
Design for packaging. Frame geometry was constrained to standard freight dimensions so units could ship to customer sites affordably without sacrificing stiffness.
03Process
Project planning covered objectives, milestones, budget, supplier confirmation, task assignment and risk mitigation. CAD followed: frame weldments, modal analysis for stiffening, bearing selection for dynamic roller loads, shaft tolerancing, and detail drawings for laser cutting, welding and powder coating. The software track ran in parallel — GUI layout in Qt Designer, C++ backend for sensor acquisition, serial communication protocols, then stress testing for real-time data handling.
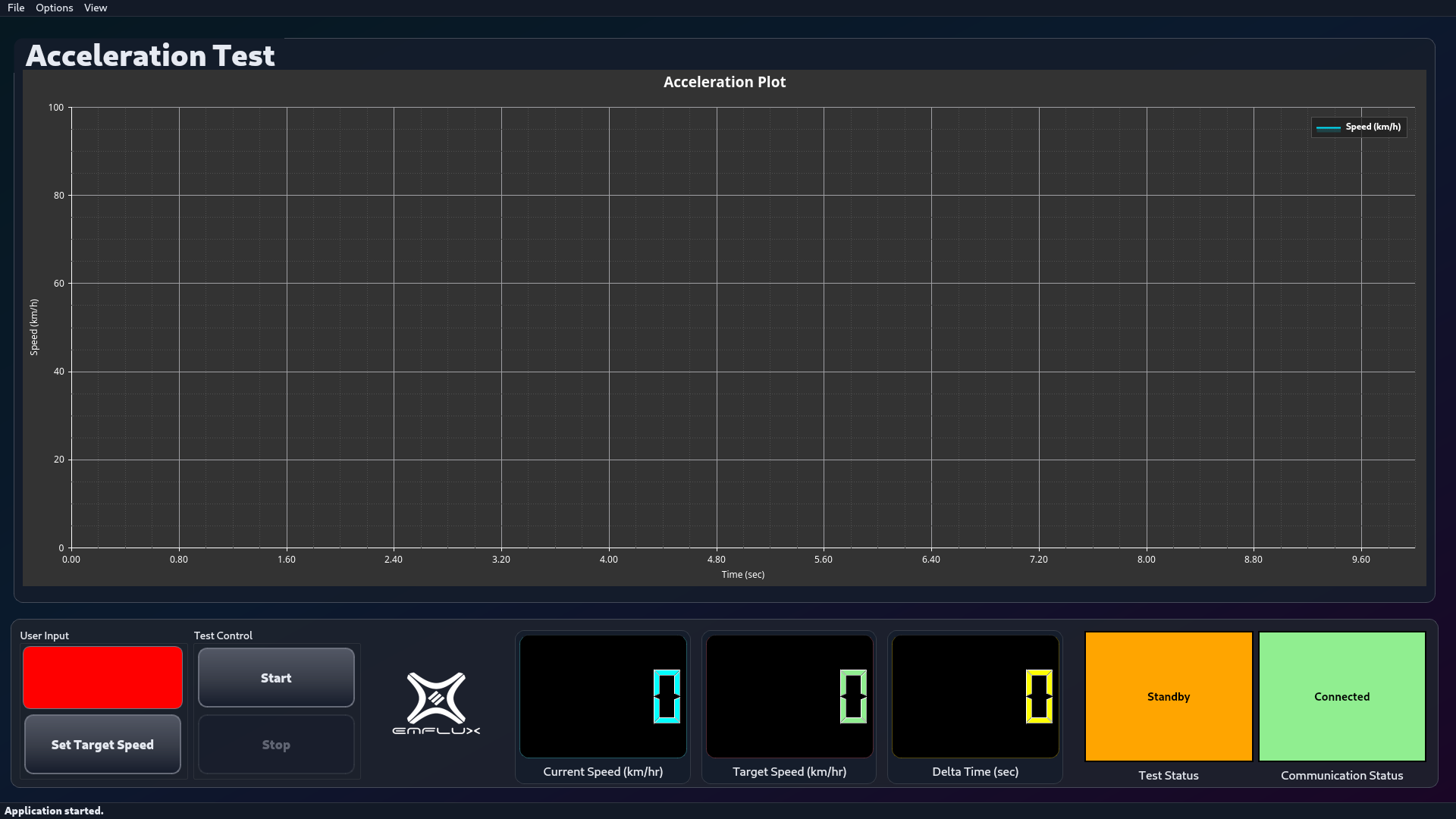
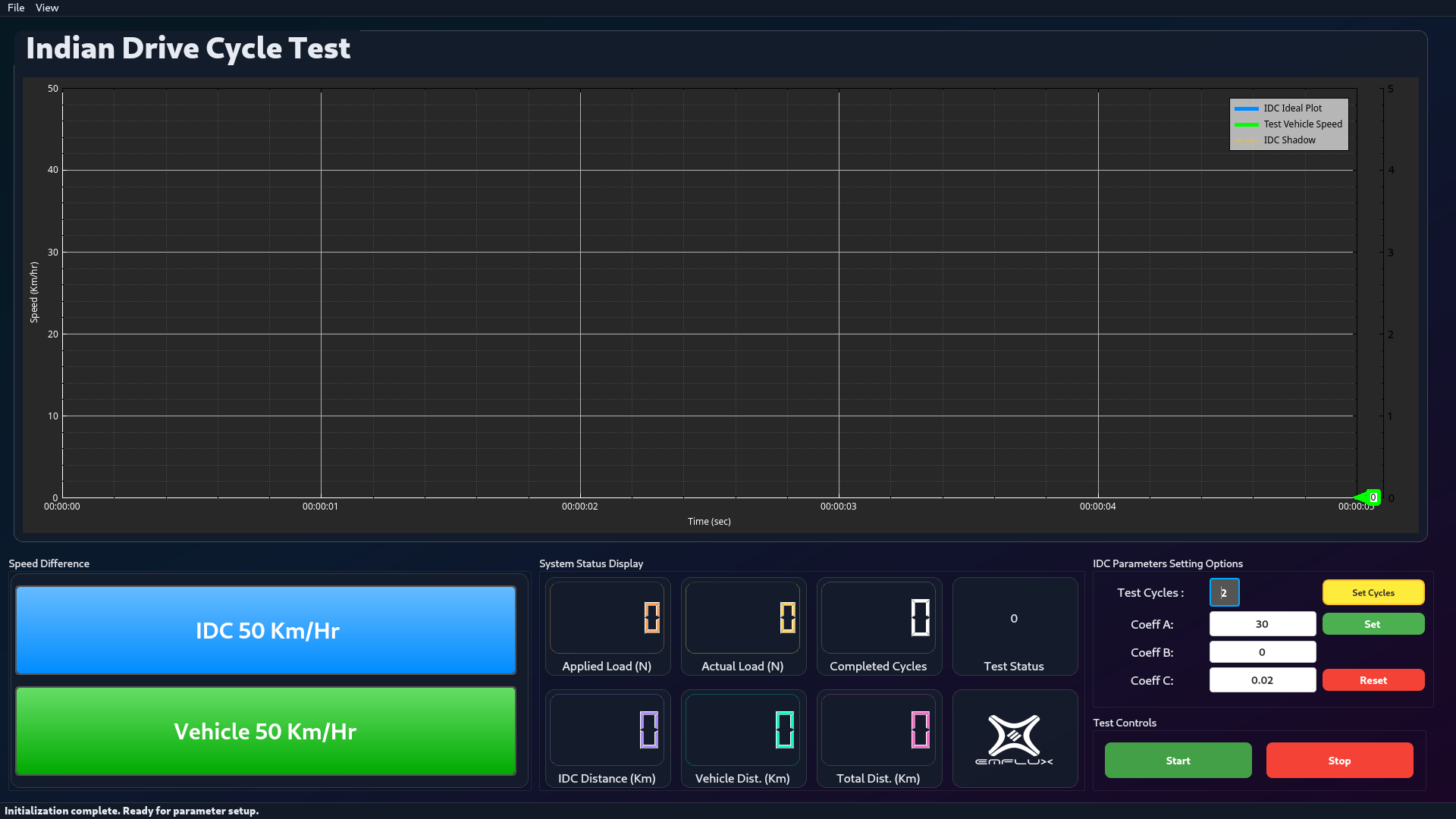
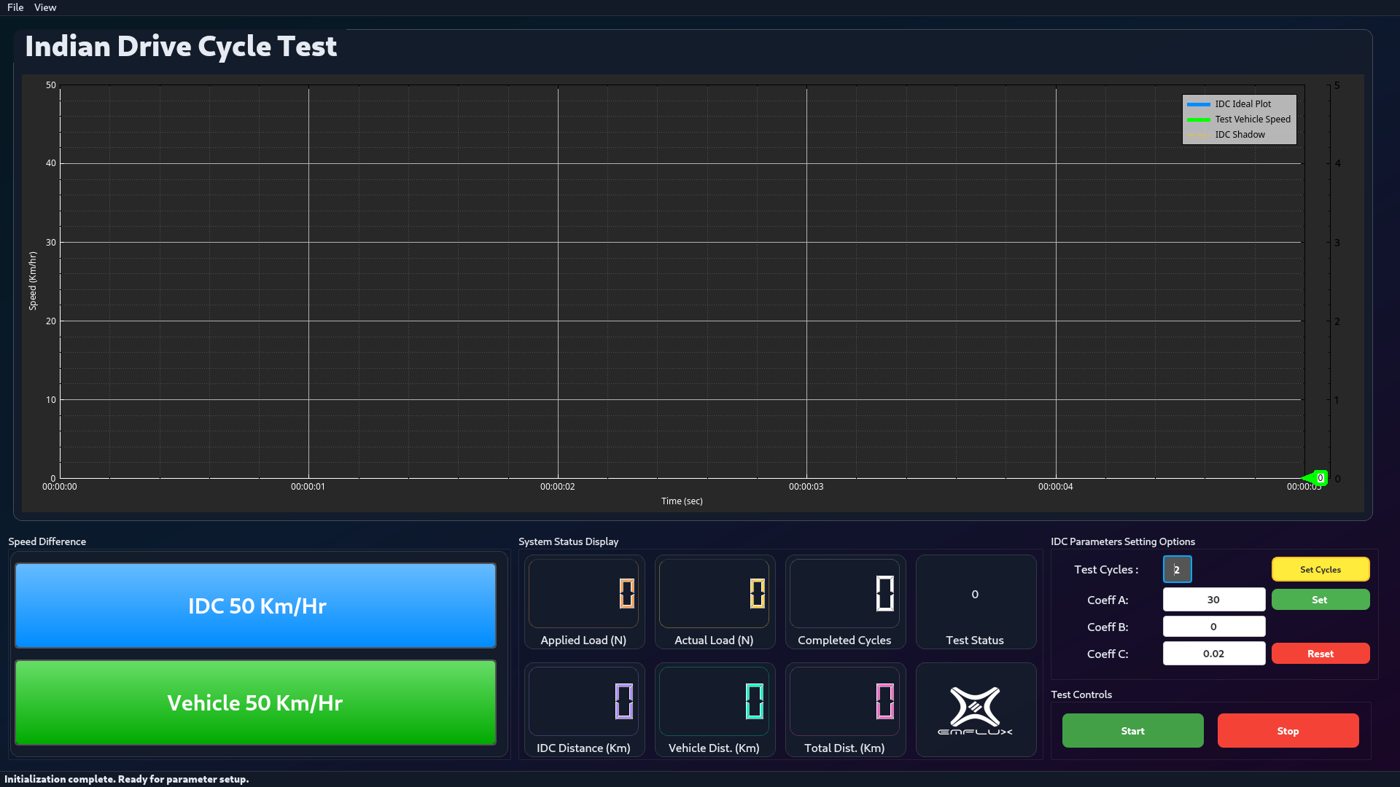
04Software — 11 Test Modes
The DAQ suite grew to cover acceleration, de-acceleration, coast-down, brake, regenerative braking, back-EMF, speedometer calibration, gradient and Indian Drive Cycle tests — each with live plotting and exportable data.
05Challenges
Frame vibration corrupting sensor data
At certain roller speeds, in-frame vibration produced noise and dropouts in the speed sensor signal. Modal analysis identified the modes; the fix combined frame stiffening with a dedicated vibration-damped sensor mounting plate. Clean data across the full speed range.
Learning the software stack mid-project
Nobody on the team had built a Qt C++ application before. The skill gap was identified in planning and budgeted as learning time rather than discovered as a crisis. The GUI shipped on schedule and became a selling point of the product.
One machine, three very different customers
A manufacturer (Shindengen), and two universities (Manipal, RV College) had different vehicles, test interests and operator skill levels. The wheelbase range, test-mode breadth and simple UI were all driven by serving these in one design.
06Outcome
Delivered
Commissioned at Shindengen Electronics, Manipal University and RV College of Engineering. Used for production diagnostics and EV research and teaching. Upgrade path to powered chassis dyno designed in from day one.
DAQ Software Suite
The custom Qt C++ data-acquisition software running the full test matrix — acceleration, speedometer, regenerative and Indian drive-cycle tests, with all screens stacked.